Rivet::AxesDefinition Class Referenceabstract Base class for projections which define a spatial basis. More...
Inheritance diagram for Rivet::AxesDefinition:
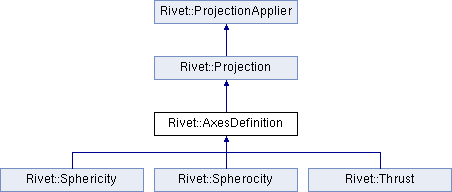
Detailed DescriptionBase class for projections which define a spatial basis. A pure virtual interface for projections which define a set of 3 basis vectors. This allows e.g. Thrust and Sphericity to be used interchangeably as defining bases for e.g. hemisphere mass and broadening calculations. Member Function Documentation◆ axis1()
Axis accessors, in decreasing order of significance. The main axis. Implemented in Rivet::Sphericity, Rivet::Thrust, and Rivet::Spherocity. Referenced by Rivet::Hemispheres::project(), and ~AxesDefinition(). The documentation for this class was generated from the following file:
Generated on Sun Feb 17 2019 21:04:58 for Rivet by  1.8.13
1.8.13
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Public Member Functions inherited from
Public Member Functions inherited from