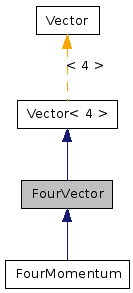
FourVector Class Reference
#include <Vector4.hh>
Detailed Description
Definition at line 19 of file Vector4.hh.
Public Member Functions | |
| FourVector () | |
| template<typename V4> | |
| FourVector (const V4 &other) | |
| FourVector (const Vector< 4 > &other) | |
| FourVector (const double t, const double x, const double y, const double z) | |
| virtual | ~FourVector () |
| double | t () const |
| double | x () const |
| double | y () const |
| double | z () const |
| FourVector & | setT (const double t) |
| FourVector & | setX (const double x) |
| FourVector & | setY (const double y) |
| FourVector & | setZ (const double z) |
| double | invariant () const |
| double | angle (const FourVector &v) const |
| double | angle (const Vector3 &v3) const |
| double | polarRadius2 () const |
| double | perp2 () const |
| Synonym for polarRadius2. | |
| double | rho2 () const |
| Synonym for polarRadius2. | |
| double | polarRadius () const |
| double | perp () const |
| Synonym for polarRadius. | |
| double | rho () const |
| Synonym for polarRadius. | |
| double | azimuthalAngle (const PhiMapping mapping=ZERO_2PI) const |
| Angle subtended by the 3-vector's projection in x-y and the x-axis. | |
| double | phi (const PhiMapping mapping=ZERO_2PI) const |
| Synonym for azimuthalAngle. | |
| double | polarAngle () const |
| Angle subtended by the 3-vector and the z-axis. | |
| double | theta () const |
| Synonym for polarAngle. | |
| double | pseudorapidity () const |
| double | eta () const |
| Synonym for pseudorapidity. | |
| Vector3 | vector3 () const |
| Get the spatial part of the 4-vector as a 3-vector. | |
| double | contract (const FourVector &v) const |
| Contract two 4-vectors, with metric signature (+ - - -). | |
| double | dot (const FourVector &v) const |
| Contract two 4-vectors, with metric signature (+ - - -). | |
| double | operator* (const FourVector &v) const |
| Contract two 4-vectors, with metric signature (+ - - -). | |
| FourVector & | operator*= (double a) |
| Multiply by a scalar. | |
| FourVector & | operator/= (double a) |
| Divide by a scalar. | |
| FourVector & | operator+= (const FourVector &v) |
| FourVector & | operator-= (const FourVector &v) |
| FourVector | operator- () const |
| Invert the vector. | |
| const double & | get (const size_t index) const |
| const double & | operator[] (const size_t index) const |
| Direct access to vector elements by index. | |
| double & | operator[] (const size_t index) |
| Direct access to vector elements by index. | |
| Vector< N > & | set (const size_t index, const double value) |
| Set indexed value. | |
| size_t | size () const |
| Vector dimensionality. | |
| bool | isZero (double tolerance=1E-5) const |
| Check for nullness, allowing for numerical precision. | |
| double | mod2 () const |
Calculate the modulus-squared of a vector.  . . | |
| double | mod () const |
Calculate the modulus of a vector.  . . | |
| bool | operator== (const Vector< N > &a) const |
| bool | operator!= (const Vector< N > &a) const |
| bool | operator< (const Vector< N > &a) const |
| bool | operator<= (const Vector< N > &a) const |
| bool | operator> (const Vector< N > &a) const |
| bool | operator>= (const Vector< N > &a) const |
Protected Member Functions | |
| double & | get (const size_t index) |
Protected Attributes | |
| Eigen::Vector< double, N > | _vec |
| Vector. | |
Friends | |
| FourVector | multiply (const double a, const FourVector &v) |
| FourVector | multiply (const FourVector &v, const double a) |
| FourVector | add (const FourVector &a, const FourVector &b) |
| FourVector | transform (const LorentzTransform <, const FourVector &v4) |
Constructor & Destructor Documentation
| FourVector | ( | ) | [inline] |
| FourVector | ( | const V4 & | other | ) | [inline] |
Definition at line 29 of file Vector4.hh.
References FourVector::setT(), FourVector::setX(), FourVector::setY(), and FourVector::setZ().
00029 { 00030 this->setT(other.t()); 00031 this->setX(other.x()); 00032 this->setY(other.y()); 00033 this->setZ(other.z()); 00034 }
| FourVector | ( | const Vector< 4 > & | other | ) | [inline] |
| FourVector | ( | const double | t, | |
| const double | x, | |||
| const double | y, | |||
| const double | z | |||
| ) | [inline] |
Definition at line 39 of file Vector4.hh.
References FourVector::setT(), FourVector::setX(), FourVector::setY(), and FourVector::setZ().
| virtual ~FourVector | ( | ) | [inline, virtual] |
Member Function Documentation
| double t | ( | ) | const [inline] |
Definition at line 49 of file Vector4.hh.
Referenced by FourVector::contract(), FourMomentum::E(), FourVector::invariant(), and Rivet::toString().
| double x | ( | ) | const [inline] |
Definition at line 50 of file Vector4.hh.
Referenced by FourVector::contract(), FourVector::invariant(), ALEPH_1996_S3196992::particleInJet(), FourMomentum::px(), and Rivet::toString().
| double y | ( | ) | const [inline] |
Definition at line 51 of file Vector4.hh.
Referenced by FourVector::contract(), FourVector::invariant(), ALEPH_1996_S3196992::particleInJet(), FourMomentum::py(), and Rivet::toString().
| double z | ( | ) | const [inline] |
Definition at line 52 of file Vector4.hh.
Referenced by H1_1994_S2919893::analyze(), FourVector::contract(), FourVector::invariant(), ALEPH_1996_S3196992::particleInJet(), FourMomentum::pz(), and Rivet::toString().
| FourVector& setT | ( | const double | t | ) | [inline] |
Definition at line 53 of file Vector4.hh.
Referenced by FourVector::FourVector(), and FourMomentum::setE().
00053 { set(0, t); return *this; }
| FourVector& setX | ( | const double | x | ) | [inline] |
Definition at line 54 of file Vector4.hh.
Referenced by FourVector::FourVector(), and FourMomentum::setPx().
00054 { set(1, x); return *this; }
| FourVector& setY | ( | const double | y | ) | [inline] |
Definition at line 55 of file Vector4.hh.
Referenced by FourVector::FourVector(), and FourMomentum::setPy().
00055 { set(2, y); return *this; }
| FourVector& setZ | ( | const double | z | ) | [inline] |
Definition at line 56 of file Vector4.hh.
Referenced by FourVector::FourVector(), and FourMomentum::setPz().
00056 { set(3, z); return *this; }
| double invariant | ( | ) | const [inline] |
Definition at line 58 of file Vector4.hh.
References FourVector::t(), FourVector::x(), FourVector::y(), and FourVector::z().
Referenced by D0_2001_S4674421::analyze(), Rivet::invariant(), and FourMomentum::mass2().
| double angle | ( | const FourVector & | v | ) | const [inline] |
Definition at line 62 of file Vector4.hh.
References Vector3::angle(), and FourVector::vector3().
Referenced by D0_1996_S3214044::_fourJetAnalysis(), H1_2000_S4129130::analyze(), H1_1994_S2919893::analyze(), and Rivet::angle().
00062 { 00063 return vector3().angle( v.vector3() ); 00064 }
| double angle | ( | const Vector3 & | v3 | ) | const [inline] |
Definition at line 66 of file Vector4.hh.
References Vector3::angle(), and FourVector::vector3().
00066 { 00067 return vector3().angle(v3); 00068 }
| double polarRadius2 | ( | ) | const [inline] |
Definition at line 70 of file Vector4.hh.
References Vector3::polarRadius2(), and FourVector::vector3().
Referenced by Rivet::polarRadius2().
00070 { 00071 return vector3().polarRadius2(); 00072 }
| double perp2 | ( | ) | const [inline] |
Synonym for polarRadius2.
Definition at line 75 of file Vector4.hh.
References Vector3::perp2(), and FourVector::vector3().
Referenced by Rivet::perp2().
00075 { 00076 return vector3().perp2(); 00077 }
| double rho2 | ( | ) | const [inline] |
Synonym for polarRadius2.
Definition at line 80 of file Vector4.hh.
References Vector3::rho2(), and FourVector::vector3().
Referenced by Rivet::rho2().
00080 { 00081 return vector3().rho2(); 00082 }
| double polarRadius | ( | ) | const [inline] |
Definition at line 84 of file Vector4.hh.
References Vector3::polarRadius(), and FourVector::vector3().
Referenced by Rivet::polarRadius().
00084 { 00085 return vector3().polarRadius(); 00086 }
| double perp | ( | ) | const [inline] |
Synonym for polarRadius.
Definition at line 89 of file Vector4.hh.
References Vector3::perp(), and FourVector::vector3().
Referenced by Rivet::perp().
00089 { 00090 return vector3().perp(); 00091 }
| double rho | ( | ) | const [inline] |
Synonym for polarRadius.
Definition at line 94 of file Vector4.hh.
References Vector3::rho(), and FourVector::vector3().
Referenced by Rivet::rho().
00094 { 00095 return vector3().rho(); 00096 }
| double azimuthalAngle | ( | const PhiMapping | mapping = ZERO_2PI |
) | const [inline] |
Angle subtended by the 3-vector's projection in x-y and the x-axis.
Definition at line 99 of file Vector4.hh.
References Vector3::azimuthalAngle(), and FourVector::vector3().
Referenced by CDF_2004_S5839831::_calcTransCones(), MC_LEADINGJETS::analyze(), H1_1994_S2919893::analyze(), D0_2008_S7863608::analyze(), D0_2008_S7719523::analyze(), D0_2008_S6879055::analyze(), D0_2006_S6438750::analyze(), CDF_2008_S8095620::analyze(), CDF_2008_S7540469::analyze(), CDF_2006_S6653332::analyze(), CDF_2004_S5839831::analyze(), Rivet::azimuthalAngle(), Rivet::deltaR(), DISKinematics::project(), and ClusteredPhotons::project().
00099 { 00100 return vector3().azimuthalAngle(mapping); 00101 }
| double phi | ( | const PhiMapping | mapping = ZERO_2PI |
) | const [inline] |
Synonym for azimuthalAngle.
Definition at line 104 of file Vector4.hh.
References Vector3::phi(), and FourVector::vector3().
Referenced by STAR_2009_UE_HELEN::analyze(), STAR_2008_S7993412::analyze(), MC_SUSY::analyze(), MC_PHOTONJETUE::analyze(), MC_PHOTONJETS::analyze(), MC_LEADINGJETS::analyze(), MC_DIPHOTON::analyze(), D0_2010_S8570965::analyze(), D0_2009_S8349509::analyze(), D0_1996_S3324664::analyze(), CDF_2008_LEADINGJETS::analyze(), CDF_2005_S6080774::analyze(), CDF_2001_S4751469::analyze(), CDF_1994_S2952106::analyze(), and Rivet::phi().
00104 { 00105 return vector3().phi(mapping); 00106 }
| double polarAngle | ( | ) | const [inline] |
Angle subtended by the 3-vector and the z-axis.
Definition at line 109 of file Vector4.hh.
References Vector3::polarAngle(), and FourVector::vector3().
Referenced by H1_1994_S2919893::beamAngle(), FourMomentum::Et(), Rivet::polarAngle(), and DISKinematics::project().
00109 { 00110 return vector3().polarAngle(); 00111 }
| double theta | ( | ) | const [inline] |
Synonym for polarAngle.
Definition at line 114 of file Vector4.hh.
References Vector3::theta(), and FourVector::vector3().
Referenced by D0_1996_S3214044::_fourJetAnalysis(), ALEPH_1996_S3196992::analyze(), and Rivet::theta().
00114 { 00115 return vector3().theta(); 00116 }
| double pseudorapidity | ( | ) | const [inline] |
Definition at line 118 of file Vector4.hh.
References Vector3::pseudorapidity(), and FourVector::vector3().
Referenced by CDF_2004_S5839831::_calcTransCones(), UA5_1986_S1583476::analyze(), UA5_1982_S875503::analyze(), SFM_1984_S1178091::analyze(), MC_TTBAR::analyze(), H1_2000_S4129130::analyze(), H1_1994_S2919893::analyze(), D0_2008_S7863608::analyze(), D0_2008_S7837160::analyze(), D0_2008_S7719523::analyze(), D0_2008_S6879055::analyze(), D0_2006_S6438750::analyze(), CDF_2008_S7540469::analyze(), CDF_2004_S5839831::analyze(), CDF_1990_S2089246::analyze(), Rivet::cmpMomByAscAbsPseudorapidity(), Rivet::cmpMomByAscPseudorapidity(), Rivet::cmpMomByDescAbsPseudorapidity(), Rivet::cmpMomByDescPseudorapidity(), Rivet::cmpParticleByAscAbsPseudorapidity(), Rivet::cmpParticleByAscPseudorapidity(), Rivet::cmpParticleByDescAbsPseudorapidity(), Rivet::cmpParticleByDescPseudorapidity(), TriggerUA5::project(), TriggerCDFRun0Run1::project(), SVertex::project(), ClusteredPhotons::project(), and Rivet::pseudorapidity().
00118 { 00119 return vector3().pseudorapidity(); 00120 }
| double eta | ( | ) | const [inline] |
Synonym for pseudorapidity.
Definition at line 123 of file Vector4.hh.
References Vector3::eta(), and FourVector::vector3().
Referenced by FinalState::accept(), UA1_1990_S2044935::analyze(), STAR_2008_S7993412::analyze(), MC_ZJETS::analyze(), MC_WJETS::analyze(), MC_SUSY::analyze(), MC_PHOTONJETUE::analyze(), MC_PHOTONJETS::analyze(), MC_DIPHOTON::analyze(), D0_2010_S8570965::analyze(), D0_1996_S3324664::analyze(), CDF_2009_S8233977::analyze(), CDF_2008_S7541902::analyze(), CDF_2008_NOTE_9351::analyze(), CDF_2005_S6080774::analyze(), CDF_2001_S4517016::analyze(), CDF_2000_S4266730::analyze(), CDF_1996_S3418421::analyze(), CDF_1994_S2952106::analyze(), ATLAS_2010_S8591806::analyze(), Rivet::eta(), NeutralFinalState::project(), and FinalState::project().
00123 { 00124 return vector3().eta(); 00125 }
| Vector3 vector3 | ( | ) | const [inline] |
Get the spatial part of the 4-vector as a 3-vector.
Definition at line 128 of file Vector4.hh.
Referenced by CDF_1996_S3349578::_fiveJetAnalysis(), D0_1996_S3214044::_fourJetAnalysis(), CDF_1996_S3349578::_fourJetAnalysis(), CDF_1997_S3541940::_psi(), CDF_1996_S3349578::_psi(), D0_1996_S3214044::_threeJetAnalysis(), CDF_1996_S3349578::_threeJetAnalysis(), OPAL_1998_S3780481::analyze(), DELPHI_1995_S3137023::analyze(), CDF_1997_S3541940::analyze(), ALEPH_1996_S3486095::analyze(), Rivet::angle(), FourVector::angle(), FourVector::azimuthalAngle(), Thrust::calc(), Sphericity::calc(), Rivet::deltaR(), FourVector::eta(), FourMomentum::p(), FourVector::perp(), FourVector::perp2(), FourVector::phi(), FourVector::polarAngle(), FourVector::polarRadius(), FourVector::polarRadius2(), Hemispheres::project(), FoxWolframMoments::project(), DISKinematics::project(), FourVector::pseudorapidity(), FourMomentum::pT2(), FourVector::rho(), FourVector::rho2(), and FourVector::theta().
| double contract | ( | const FourVector & | v | ) | const [inline] |
Contract two 4-vectors, with metric signature (+ - - -).
Definition at line 134 of file Vector4.hh.
References FourVector::t(), FourVector::x(), FourVector::y(), and FourVector::z().
Referenced by Rivet::contract(), FourVector::dot(), and FourVector::operator*().
00134 { 00135 const double result = t()*v.t() - x()*v.x() - y()*v.y() - z()*v.z(); 00136 return result; 00137 }
| double dot | ( | const FourVector & | v | ) | const [inline] |
Contract two 4-vectors, with metric signature (+ - - -).
Definition at line 140 of file Vector4.hh.
References FourVector::contract().
00140 { 00141 return contract(v); 00142 }
| double operator* | ( | const FourVector & | v | ) | const [inline] |
Contract two 4-vectors, with metric signature (+ - - -).
Definition at line 145 of file Vector4.hh.
References FourVector::contract().
00145 { 00146 return contract(v); 00147 }
| FourVector& operator*= | ( | double | a | ) | [inline] |
Multiply by a scalar.
Definition at line 150 of file Vector4.hh.
References Vector::_vec, Vector< 4 >::_vec, and FourVector::multiply.
| FourVector& operator/= | ( | double | a | ) | [inline] |
Divide by a scalar.
Definition at line 156 of file Vector4.hh.
References Vector::_vec, Vector< 4 >::_vec, and FourVector::multiply.
| FourVector& operator+= | ( | const FourVector & | v | ) | [inline] |
| FourVector& operator-= | ( | const FourVector & | v | ) | [inline] |
| FourVector operator- | ( | ) | const [inline] |
Invert the vector.
Reimplemented from Vector< 4 >.
Definition at line 171 of file Vector4.hh.
References Vector< 4 >::_vec, and Vector::_vec.
00171 { 00172 FourVector result; 00173 result._vec = -_vec; 00174 return result; 00175 }
| const double& get | ( | const size_t | index | ) | const [inline, inherited] |
Definition at line 33 of file VectorN.hh.
References Vector::_vec.
00033 { 00034 if (index >= N) { 00035 throw std::runtime_error("Tried to access an invalid vector index."); 00036 } else { 00037 return _vec(index); 00038 } 00039 }
| double& get | ( | const size_t | index | ) | [inline, protected, inherited] |
Definition at line 126 of file VectorN.hh.
References Vector::_vec.
00126 { 00127 if (index >= N) { 00128 throw std::runtime_error("Tried to access an invalid vector index."); 00129 } else { 00130 return _vec(index); 00131 } 00132 }
| const double& operator[] | ( | const size_t | index | ) | const [inline, inherited] |
| double& operator[] | ( | const size_t | index | ) | [inline, inherited] |
| Vector<N>& set | ( | const size_t | index, | |
| const double | value | |||
| ) | [inline, inherited] |
Set indexed value.
Definition at line 52 of file VectorN.hh.
References Vector::_vec.
00052 { 00053 if (index >= N) { 00054 throw std::runtime_error("Tried to access an invalid vector index."); 00055 } else { 00056 _vec[index] = value; 00057 } 00058 return *this; 00059 }
| size_t size | ( | ) | const [inline, inherited] |
| bool isZero | ( | double | tolerance = 1E-5 |
) | const [inline, inherited] |
Check for nullness, allowing for numerical precision.
Definition at line 67 of file VectorN.hh.
References Vector::_vec, and Rivet::isZero().
00067 { 00068 for (size_t i=0; i < N; ++i) { 00069 if (! Rivet::isZero(_vec[i], tolerance) ) return false; 00070 } 00071 return true; 00072 }
| double mod2 | ( | ) | const [inline, inherited] |
Calculate the modulus-squared of a vector. .
Definition at line 76 of file VectorN.hh.
References Vector::mod2(), and Vector::size().
00076 { 00077 double mod2 = 0.0; 00078 for (size_t i = 0; i < size(); ++i) { 00079 const double element = get(i); 00080 mod2 += element*element; 00081 } 00082 return mod2; 00083 }
| double mod | ( | ) | const [inline, inherited] |
Calculate the modulus of a vector. .
Definition at line 87 of file VectorN.hh.
References Vector::mod2().
00087 { 00088 const double norm = mod2(); 00089 assert(norm >= 0); 00090 return sqrt(norm); 00091 }
| bool operator== | ( | const Vector< N > & | a | ) | const [inline, inherited] |
Definition at line 100 of file VectorN.hh.
References Vector::_vec.
00100 { 00101 return _vec == a._vec; 00102 }
| bool operator!= | ( | const Vector< N > & | a | ) | const [inline, inherited] |
Definition at line 104 of file VectorN.hh.
References Vector::_vec.
00104 { 00105 return _vec != a._vec; 00106 }
| bool operator< | ( | const Vector< N > & | a | ) | const [inline, inherited] |
Definition at line 108 of file VectorN.hh.
References Vector::_vec.
00108 { 00109 return _vec < a._vec; 00110 }
| bool operator<= | ( | const Vector< N > & | a | ) | const [inline, inherited] |
Definition at line 112 of file VectorN.hh.
References Vector::_vec.
00112 { 00113 return _vec <= a._vec; 00114 }
| bool operator> | ( | const Vector< N > & | a | ) | const [inline, inherited] |
Definition at line 116 of file VectorN.hh.
References Vector::_vec.
00116 { 00117 return _vec > a._vec; 00118 }
| bool operator>= | ( | const Vector< N > & | a | ) | const [inline, inherited] |
Definition at line 120 of file VectorN.hh.
References Vector::_vec.
00120 { 00121 return _vec >= a._vec; 00122 }
Friends And Related Function Documentation
| FourVector multiply | ( | const double | a, | |
| const FourVector & | v | |||
| ) | [friend] |
Definition at line 190 of file Vector4.hh.
Referenced by FourVector::operator*=(), and FourVector::operator/=().
00190 { 00191 FourVector result; 00192 result._vec = a * v._vec; 00193 return result; 00194 }
| FourVector multiply | ( | const FourVector & | v, | |
| const double | a | |||
| ) | [friend] |
| FourVector add | ( | const FourVector & | a, | |
| const FourVector & | b | |||
| ) | [friend] |
Definition at line 212 of file Vector4.hh.
00212 { 00213 FourVector result; 00214 result._vec = a._vec + b._vec; 00215 return result; 00216 }
| FourVector transform | ( | const LorentzTransform & | lt, | |
| const FourVector & | v4 | |||
| ) | [friend] |
Member Data Documentation
Eigen::Vector<double,N> _vec [protected, inherited] |
Vector.
Definition at line 135 of file VectorN.hh.
Referenced by FourVector::operator*=(), FourVector::operator+=(), FourVector::operator-(), FourVector::operator-=(), and FourVector::operator/=().
The documentation for this class was generated from the following file: